«На 100 процентах мощности колеса буксуют». Как своими руками сделать практичный электромобиль
Subaru Libero сам по себе интересный автомобильчик: 7-местный салон, высокий дорожный просвет и полный привод, панорамная крыша, оппозитный двигатель под полом багажника… Но минчанин Алексей пошел дальше, установив вместо «оппозитника» электрическую силовую установку.
Партнер материала — WestMotors. Этот Subaru Libero мы увидели на выставке электромобилей, которую организовала компания. Если нет времени и возможности сконструировать электромобиль своими руками, множество вариантов можно заказать из США с помощью WestMotors usa-avto.by.
«Стоимость проекта получилась около 4500 долларов»
«Идея зарождалась давно, — начинает рассказ создатель этого электро-Subaru. — Лазал по форумам, вникал, что к чему. Решил сделать собственный электромобиль. Стало интересно, как он едет, как эксплуатируется. Покупать готовый получалось дорого и не так интересно, поэтому решил делать свой. На «субариках» я давно езжу, у меня были все модели. В итоге решился убрать оппозитный двигатель и полный привод и сделать Libero переднеприводным электромобилем.
Сам Subaru Libero был куплен за 600 долларов, причем с пробегом что-то около миллиона километров. Повезло с электромотором 6,3 киловатта от погрузчика Balkancar, который удалось найти новым всего за 250 долларов. Самодельный контроллер из Украины обошелся в 500 долларов, а батарея на 24 киловатта от электрокара Nissan Leaf из Хабаровска — в 2500. Общая стоимость проекта получилась около 4500 долларов».

Алексей живет не в частном доме, а в обычной квартире. Работает, как ни странно, электриком. Во дворе никакой «зарядки» у него нет. Как же он заряжается?

«Заряжаюсь в основном в гараже, когда там ковыряюсь. Медленно, но для езды хватает. Есть зарядные станции «Белоруснефти», они пока бесплатные. Ими можно за три часа полностью зарядить мой электромобиль. Летом на полном заряде можно проехать 150 километров, зимой — 100. Почему выбрал Libero? Потому что это очень практичный автомобиль. При небольших внешних размерах он очень просторный и удобный внутри».


Subaru Libero выпускался в 1986-1998 годах. Вмещает машина, однако, аж семь человек вместе с водителем. Здесь три ряда сидений, прозрачная крыша с огромным люком или даже несколькими люками, широчайшие возможности трансформации салона.

Подключаемый из салона полный привод (постоянно ведущая задняя ось), полноценная рама, две боковые сдвижные двери, поворотные передние кресла. Средний ряд раскладывается и образует столик. То есть вчетвером можно очень комфортно остановиться на пикник. Есть возможность раскладывания среднего и заднего рядов в ровную двуспальную кровать.
В общем, в идеале можно заехать куда-нибудь в дебри, разложить салон в ровное спальное место, лежать и смотреть на звезды. Есть такое исполнение люка, есть с двумя люками и прозрачными стеклами, где передний люк поднимается, а задний сдвигается.


Единственный нюанс — не самый мощный и надежный 1,2-литровый моторчик. Но теперь стоит надежный и тяговитый электромотор, причем он работает на 60% своей мощности. На 100% он просто беспомощно буксует. Пока что скорость авто ограничена на 70 км/ч. На месте бензинового мотора теперь располагается батарея.

А как на ходу?
Проехали и мы на этом чуде технике. Не сказать, что ураган, но одну светофорную гонку мы выиграли. Правда, остальные участники вряд ли были в курсе, что это была гонка.

Мотор выдает максимальную тягу с 0 оборотов, его не нужно раскручивать, поэтому нажал — сразу поехал. В любом случае явно резвее, чем с 1,2-литровым мотором.

Управлять им просто. Есть ручка переключения направления движения вперед-назад, «ручник», педаль тормоза и «газа». И все. Тормоза неплохие, выворот хорош, сидеть удобно. Вроде самоделка, но ездить можно вполне нормально.
В поворотах, если проходить их быстро, страшновато. Мотор расположен под днищем по центру, батарея тоже низко, но все равно кренится автомобиль прилично. Тихим его не назовешь — очень много звуков создает сама электрическая установка. Плюс возраст авто все же сказывается… В любом случае по своим возможностям, учитывая размеры, это просто монстр, а не кей-кар.

Дорожный просвет большой, свесы короткие, веса мало, поэтому и в переднеприводном варианте он остается достаточно проходимым автомобилем.
«Когда был Хавьер, у меня был бензиновый Libero. Мы по полю ехали, машина остановилась только тогда, когда лобовое стекло уперлось в снег. Причем обратно она выехала. Это очень проходимый автомобильчик. Да, привод теперь передний, но все равно проходимость остается на уровне».

По подсчетам Алексея автомобиль за 2,5-3 года отобьется, «потому что обслуживать не надо, «зарядки» на «Белоруснефти» бесплатные, ездишь бесплатно. Да, я старый «субарист», но пересел на электромобиль и теперь пересаживаться обратно на ДВС мне не хочется».
Заметки на полях

Бачок омывающей жидкости расположен прямо в салоне возле пассажирского кресла. Заправлять удобно, зимой не замерзает.

Для обогрева используется бензиновый отопитель Webasto.

Обзорность у авто «аквариумная», видно все очень хорошо. Посадка высокая, но удобная. Гидроусилителя руля нет, но рулевое колесо крутится легко.

Бачок тормозной жидкости находится прямо в салоне. Капота как такового у автомобиля нет.
Практичные, для работы или для души — предложения под разные нужды в нашей базе автообъявлений
Самодельный электромобиль — всё не так, как думаешь
Всем привет. Учась в университете я собрал маленький электромобильчик, ну или карт. Его фишкой было то, что всё управление электроприводом, включая тормоза было отдано самодельному контроллеру. И именно о том, как я делал этот маленький автомобильчик, и с какими подводными камнями столкнулся при постройке — хотелось бы рассказать в данном материале. Материал не претендует на уникальность, но для меня это был большой и интересный опыт.

Тема рассказа стоит на стыке аппаратного и программного аспектов. И в прошивке для контроллера я имел дело не с какими-то абстрактными понятиями или данными, а со вполне реальными «физическими» устройствами: реле, электродвигателем, транзисторами итп. Так что приведу кратенькую характеристику технической части, тот состав который был на момент всех танцев с бубном.
Основные узлы
Тяговый двигатель — коллекторный универсальный. Может работать как от постоянного, так и от переменного тока. Рабочее напряжение 220 вольт.

Аккумуляторная батарея — 25 свинцово-кислотных ячеек по 6 вольт фирмы Casil, соединённых последовательно, по итогу получаем батарею 150-160 вольт. Она установлена сзади и перемотана синей изолентой, всё как положено 

Двигатель приводил колёса в движение через червячный редуктор с передаточным числом i=10. На фото видно, что двигатель сочленен с редуктором с помощью небольшого валика, он был выточен специально.
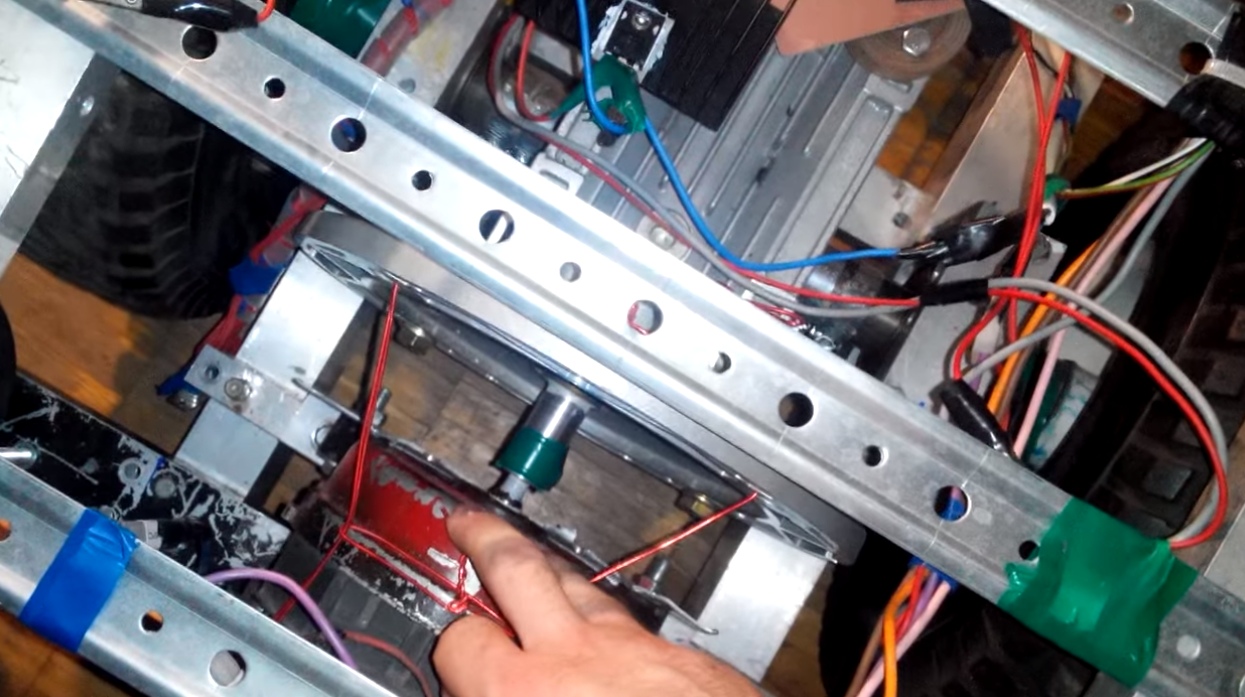
Системы торможения, то есть тормозного диска с суппортом не было в принципе. Поставить физический тормоз на тот момент не получалось. Поэтому торможение двигателем оставалось единственным реальным вариантом, так что управление торможением машины тоже пришлось брать на себя контроллеру.
Контроллер для блока управления
В принципе простой контроллер для электромобиля можно собрать и на «рассыпухе». Но хотелось бы, чтоб была возможность всё красиво настраивать с помощью программы, 21 век всё-таки. Путём долгих высоконаучных рассуждений за ужином я решил, что за основу контроллера стоит взять чип фирмы Microchip — pic16f877a, вот его краткие характеристики:

На тот момент я не очень шарил в электронике, и изначально хотел делать схему до безобразия тупой — двигатель включён или двигатель отключен, но вместо реле поставить транзисторный ключ, дабы ничего не щёлкало и не горело. Но решил, что риск оправдан, я ничего не терял да и просто хотелось сделать что-то стоящее. Так что остановился на связке микроконтроллер + силовой полевой транзистор в качестве ключа. Ручку газа и кнопку реверса вывел на руль.
Особенности схемы
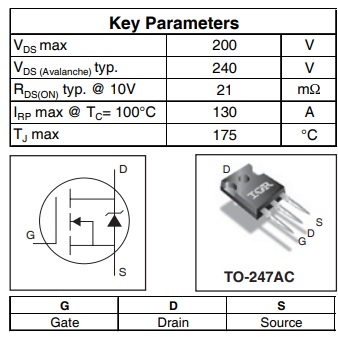
При выборе транзистора я не скупился и выбрал IRFP4227PBF — N-канальный полевой транзистор (открывается положительным импульсом) на напряжение 200 вольт и максимальный ток 130 ампер. Корпус TO-247AC. Но, забегая вперед скажу — я смог сжечь и его.
PWM — что это такое и с чем её едят
Раз я использовал микроконтроллер в связке с полевым транзистором, то грех было не попробовать использование pwm/шим в схеме. Что такое шим? Широтно-импульсная модуляция (ШИМ, англ. pulse-width modulation (PWM)) — процесс управления мощностью методом пульсирующего включения и выключения прибора. — спасибо Википедии.
Достоинство такого способа управления транзистором: он во время работы находится в двух состояниях — либо полностью закрыт, тока нет и ничего не греется, либо он полностью открыт и сопротивление его составляет несколько милиом, соответственно в тепло на самом транзисторе рассеиваются какие-то доли ватта тепла, ну или единицы ватт, схема едва тёплая при таком режиме работы. И такой процесс — отрыть/закрыть происходит тысячи раз в секунду. Это называется частотой шим. Так же есть такая вещь, которая называется «скважность». Переводя на человеческий язык — эта цифра показывает какую долю времени открыт транзистор. Если чуть углубиться — допустим у нас частота ШИМ-синала 1000 герц. Значит транзистор открывается и закрывается 1000 раз за секунду, и процесс переключения между включено и выключено 1/1000 доля секунды. Величина 1/1000 — это период частоты. А с помощью скважности мы показываем какую часть времени от периода транзистор открыт и через него течет ток. Для примера: в программе скважность 255 — это максимальная мощность, 127 — 50%, 0 — транзистор закрыт.
Для генерации такой частоты применялся встроенный в чип «физический» контроллер, хотя есть возможность программной реализации, но в этом случае контроллер только и будет делать, что генерировать на выводе частоту с заданным периодом и скважностью. А с использованием контрллера из переферии МК можно было и генерировать сигнал, и чтоб программа делала что-то ещё.
Чем дальше в лес, тем злее волки — от частоты ШИМ зависит и то, насколько будет эффективно работать электропривод. Я пробовал разные частоты, от 2 до 15 килогерц, каждый раз это менялось программно. Честно говоря особой разницы не успел заметить, но уверен что она есть. К сожалению данных по этому вопросу не удалось получить в достаточном количестве. Единственное, что заметил — с разной частотой пищала машина во время работы. Кстати, если кто-то замечал в метро, электробусах и поездах, что во время старта слышно гул, писк, завывание — это как-раз таки пищат обмотки двигателя из-за работы на частотах контроллера. Очень это заметно на поезде «Ласточка», который по МЦК ходит, во время старта.
Подводные камни в алгоритме работы
Следующая проблема была с реверсом двигателя. Двигатель коллекторный, у него две обмотки — неподвижная — статор, на корпусе, и вращающаяся — ротор. Для изменения направления вращения необходимо развернуть направление тока в одной из обмоток, не меня направления в другой. Для этого использовались два реле, срабатывали они одновременно, «перекидывая» схему на реверс при подаче на них питания. Но в первом варианте прошивки была ошибка — реле переключились под нагрузкой. Как итог теста под нагрузкой — два сгоревших реле, так как двигатель — индуктивная нагрузка и на контактах реле была нехилая такая дуга, контакты просто расплавились и сгорели во время переключения.
Выход из ситуации — вводим в программу условие, что перед переключением снимаем нагрузку выкручивая скважность PWM-сигнала на 0, перекидываем реле, и опять включаем мощность на заданный уровень. Именно так и работали тормоза на машине — реверсом. Только хардкор — никаких датчиков и энкодеров, ничего. А вот и фото релюшки, это вроде как реле стартера от жигулей. Если переключать их не под нагрузкой, то вполне работают и с высокими напряжениями, 160 вольт при 15 амперах держали, но допускаю, что контакты грелись ввиду малого сечения.


После я допилил прошивку и мощность поднималась плавно до заданного уровня. А это уже исключает удары в трансмиссии и нагрузку на узлы. Вот так одна строчка в программе может увеличить срок службы агрегата.
Соединяем контроллер с транзистором правильно
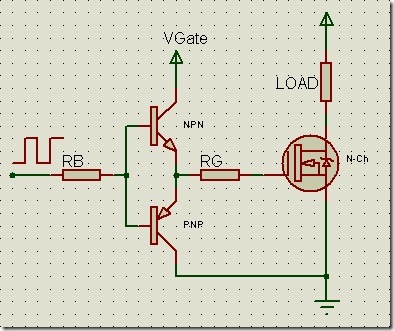
Оставалось только правильно сочленить транзистор с контроллером. Сделал я это несколько не правильно, через оптическую пару, напрямую. Но эта схема прокатывает при работе с низкими напряжениями, при высоких рабочих напряжениях постоянно сгорал затвор транзистора, да и для управления нужен двухтактный драйвер. Нормальная схема приведена ниже. Но тем не менее на один раз схемы с оптической парой хватило, каким-то чудом на тест драйве она работала, а выгорать начала сразу после него. Вот схема «правильного» драйвера, только в моём варианте ещё была развязка оптикой от контроллера. Картинка взята с Drive2:
Несколько интересных моментов
В конце концов получилось то, что на видео
Вообще мои опыты с электроприводом начались ещё в школе и я испробовал много разных конструкций, но это самая удачная схема на тот момент. Если материал понравится, то напишу отдельный пост про всю эпопею.
UPD: Изменил ошибки в статье, спасибо всем, кто откликнулся
Источник Источник https://www.abw.by/novosti/experience/213361
Источник https://m.habr.com/ru/post/473708/





