15 различных типов роботов

ИИ и робототехника, несомненно, являются двумя наиболее перспективными направлениями исследований в настоящее время. Эти две области, несомненно, определят будущее человечества. В настоящее время мы располагаем ультрасовременными машинами с изящным дизайном, подвижными и высокопроизводительными корпусами, способными выполнять практически любые виды работ с высокой эффективностью. У нас также есть машинный интеллект, который буквально революционизирует то, как мы выполняем большую часть нашей работы.
Хотя ИИ всегда является интересной темой для разговоров, как мы это делали бесчисленное количество раз здесь, на нашем веб-сайте, давайте сегодня поговорим о роботах. Как вы, наверное, знаете, существует множество различных способов отличить роботов. Вы наверняка знаете хотя бы некоторые из них, но всегда есть и другие.
По сути, роботы делятся на две большие категории: в зависимости от их применения, а вторая основана на кинематике или перемещении. Ниже мы классифицировали роботов только на основе кинематики. Почему это так? Что ж, применение любого предмета, особенно роботов, туманно описывает его характеристики. Например, два разных типа роботов могут выполнять одну и ту же работу, давая одинаковый результат.
Мы упомянули только основные типы роботов, и они подразделяются на кинематику.
Роботизированные манипуляторы или стационарные роботы
1. Декартовы роботы

Декартовы роботы, пожалуй, наиболее распространенный тип роботов, используемых как в промышленных, так и в коммерческих целях. Иногда их называют портальными роботами, они имеют три линейные оси, т.е. Они могут двигаться только по прямой линии, а не вращаться, и установлены под прямым углом. Механическое устройство декартовых роботов намного проще, чем у большинства других стационарных роботов.
2. Цилиндрический робот
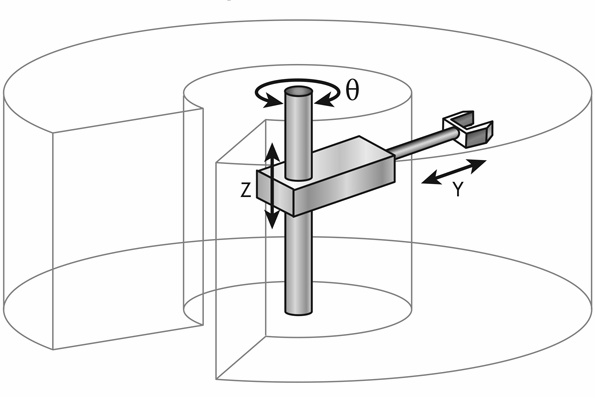
Цилиндрические роботы обычно используются для сборки, точечной сварки и машинного литья под давлением. Хотя в наши дни эти типы роботов относительно редки, они все же могут быть полезны. Как следует из названия, он образует цилиндрическую рабочую систему координат.
Как вы можете видеть на диаграмме выше, цилиндрический робот имеет три оси движения. По оси Z он вращается и перемещается вертикально; а по оси Y он движется линейно. Иногда эти цилиндрические роботы ошибочно принимают за роботов SCARA или наоборот. Несмотря на то, что их рабочая среда почти одинакова, их структура и область применения различаются.
3. Роботы SCARA
SCARA или Selective Compliance Assembly/Articulated Robot Arm (Сочлененный манипулятор робота) более широко используется для сборки во всем мире благодаря простоте и беспрепятственного монтажа.
Роботы SCARA обычно имеют так называемую последовательную архитектуру, в которой один базовый двигатель должен нести все остальные установленные двигатели. Одним из недостатков этих типов роботов является то, что они чрезвычайно дороги по сравнению с довольно недорогими декартовыми роботами. Кроме того, для работы им требуется сложное программное обеспечение высокого уровня.
4. Параллельные роботы

Параллельные роботы более известны как параллельные манипуляторы, в которых связка управляемых машиной роботизированных цепей поддерживает конечный эффектор или просто конечную платформу. Одним из лучших примеров этого типа роботов являются имитаторы полета, которые военные и коммерческие пилоты используют для улучшения своих летных способностей путем моделирования реальных ситуаций.
Слово «параллельный» не должно быть неправильно понято, так как оно подразумевает не геометрическую установку, а, скорее, уникальную характеристику робота данного типа в компьютерной науке. Здесь параллель означает, что конечная точка каждой индивидуальной связи полностью отличается от других.
Параллельный робот специально разработан, чтобы оставаться жестким и противостоять всем нежелательным помехам и движениям, в отличие от серийных роботов-манипуляторов. Хотя каждый привод работает с определенной степенью свободы, их гибкость в конечном итоге ограничивается другими приводами. Его жесткость и прочность отделяют параллельные манипуляторы от серийных цепных роботов.
5. Шарнирные роботы

Когда кто-то говорит о промышленных роботах, есть большая вероятность, что они имеют в виду шарнирных роботов. Эти роботы чрезвычайно универсальны и хорошо подходят для промышленных работ, в отличие от большинства других типов роботов, которые мы показали выше. Эта маневренность и универсальность проистекают из дополнительных осей, которых обычно от четырех до шести, но может достигать и 10. Их основные области применения — погрузочно-разгрузочные работы, дозирование, сварка и т.д.
6. Сферические роботы

По уровню сложности сферические роботы находятся где-то между декартовыми или цилиндрическими роботами и сверхсложными шарнирно-сочлененными роботами. По сути, сферический робот — это робот среднего размера внутри сферического шара, который движется с помощью IDU (Internal Driving Unit). Эти мобильные сферические роботы чрезвычайно эффективны при наблюдении и мониторинге, а также могут использоваться под водой.
Колесные и ножные роботы
7. Одноколесные роботы
Мы все ездили на велосипеде или мотоцикле по крайней мере один раз, но сколько из вас на самом деле ездили на одноколесном велосипеде? Проблема в том, что одноколесные велосипеды нестабильны, как велосипеды, поэтому их сложно удерживать в равновесии, и без надлежащей поддержки можно мгновенно упасть.
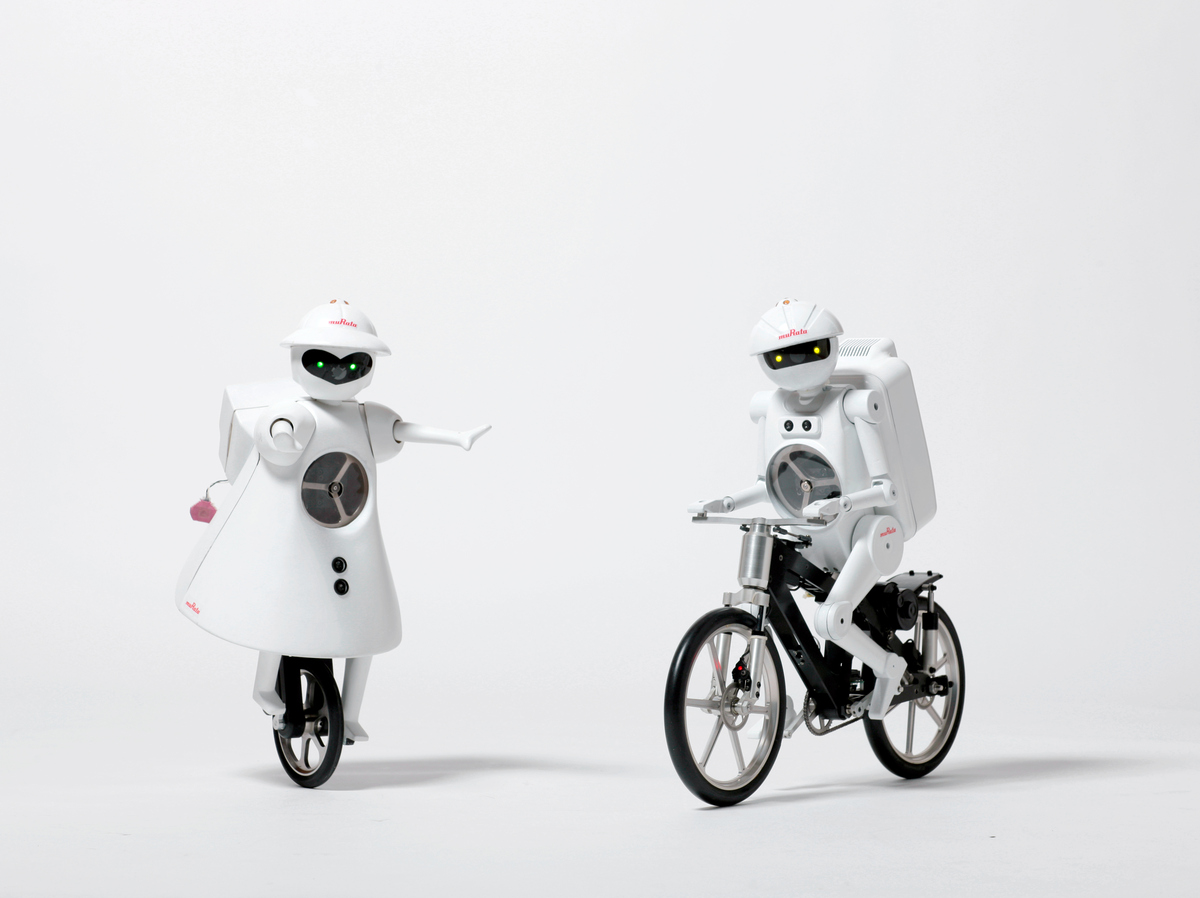
Создание одноколесного робота представляет собой сложную задачу для инженеров, поскольку они должны сделать его динамически стабильным, а также эффективным. Одним из таких примеров одноколесного робота является MURATA GIRL.
Девушка Мурата или Мурата Сейко-чан — моноцикл-робот, произведенный японской компанией по производству электроники Murata. По заявлению компании, у нее есть продвинутые гироскопические датчики, которые позволяют ей поддерживать равновесие, устройство Bluetooth для связи и ультразвуковой датчик для обнаружения целей. Такие компактные роботы могут пригодиться в местах большого скопления людей.
8. Двухколесные роботы
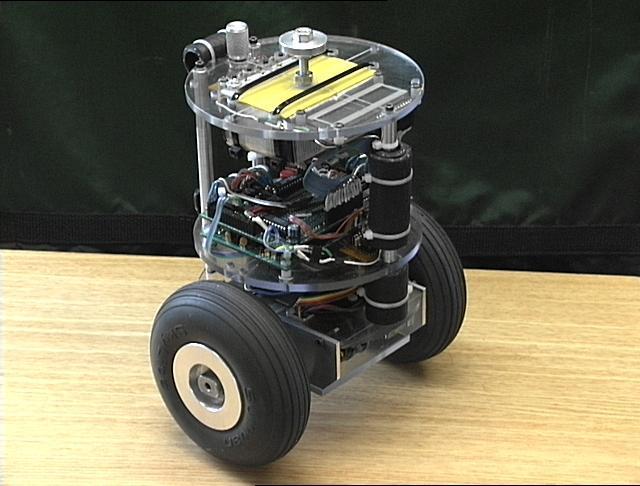
Вы хотите создавать собственных роботов? Если да, то маленькие двухколесные роботы, возможно, для вас правильный путь. Их простой и эффективный дизайн — причина того, что в настоящее время широко распространены двухколесные роботы. Все, что вам нужно, это пара моторов и два колеса для передвижения.
Но, как и у любого другого робота, у них тоже есть свои недостатки. Двухколесные роботы имеют плохой баланс, так как они используют только два колеса с обеих сторон, и они всегда должны быть в движении, чтобы поддерживать вертикальное положение. Чтобы сделать его более устойчивым, батареи устанавливаются непосредственно под их корпусом.
9. Трехколесные роботы
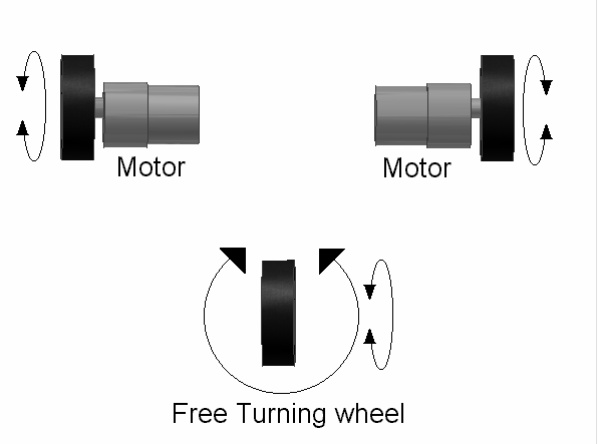
Трехколесные роботы обычно бывают двух типов в зависимости от характера управляемых колес. В первом типе два колеса имеют отдельный привод, в то время как третье колесо вращается свободно для баланса (с дифференцированным управлением). Во втором типе два колеса питаются от одного источника, а третье колесо — от другого.
Для трехколесных роботов с дифференцированным управлением направление, в котором робот движется в данный момент времени, может быть изменено путем изменения относительной скорости вращения двух ведущих колес. Когда два колеса имеют одинаковую скорость вращения и одинаковое направление, робот продолжает движение прямо.
10. Роботы-гуманоиды
Как следует из названия, робот-гуманоид — это тип робота, который копирует человеческое тело. Дизайн роботов-гуманоидов — это то, что отличает их от других типов мобильных роботов. Типичный робот-гуманоид состоит из головы, двух рук, туловища и двух ног, как и человек, но многие из этих роботов основаны только на какой-то части человеческого тела, например, от пояса вверх или что-то в этом роде.
Одним из основных компонентов робота-гуманоида являются датчики, поскольку они играют ключевую роль в робототехнических парадигмах. Есть два типа датчиков: проприоцептивные и экстероцептивные. Проприоцептивные датчики чувствуют ориентацию робота, его положение и другие моторные навыки, в то время как экстероцептивные включает в себя датчики зрения и звука.
11. Трехногие и четвероногие роботы
Трипедальные или трехножные роботы не так распространены, однако в лаборатории робототехники и механизмов в Вирджинии был разработан радикальный трехножный робот под названием STriDER. Он использует довольно новую концепцию пассивного динамического передвижения для динамической ходьбы и высокой эффективности, которой также можно управлять с минимальным контролем.
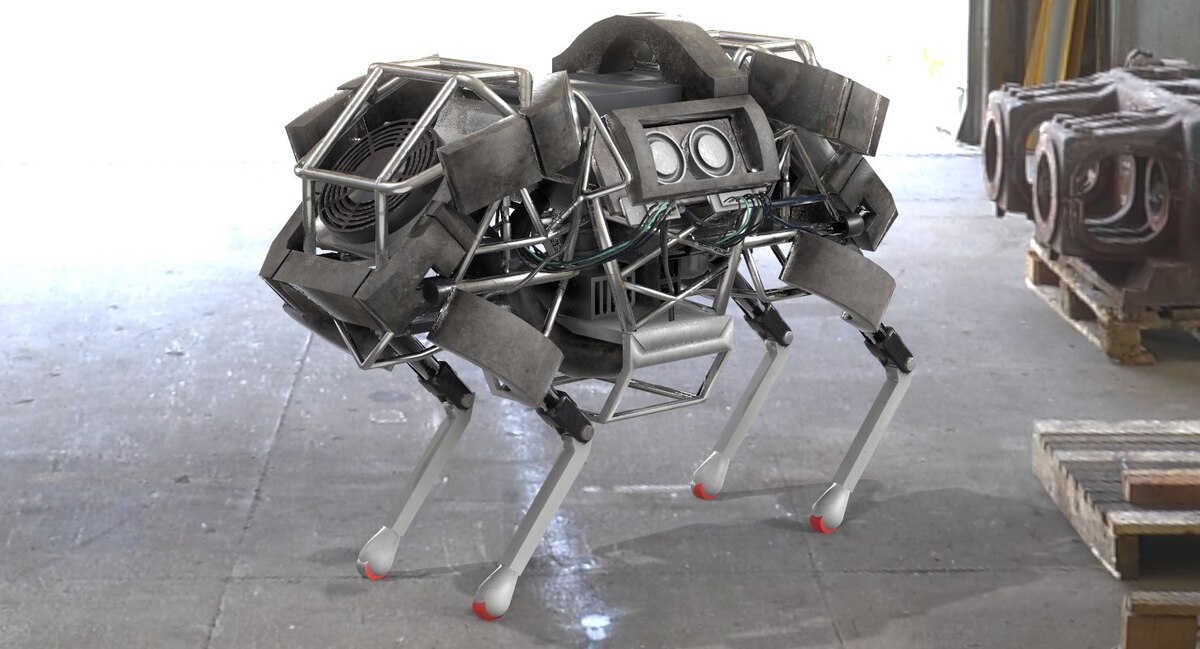
В отличие от трехногих роботов, четвероногие роботы более популярны. Четвероногие роботы, обладают большей устойчивостью, особенно когда они не находятся в движении. Многие четвероногие роботы используют чередующуюся технику ходьбы (попарно). Некоторые из лучших примеров четвероногих роботов — WildCat, Cheetah и Big Dog.
12. Роботы-Гексаподы

В геометрии шестиугольник подразумевает шестигранный многоугольник, поэтому гексапод будет означать робота с шестью ногами, верно? Да, это так. Теперь, когда робот может быть абсолютно устойчивым всего на трех ногах, остальные ноги робота-гексапода обеспечивают большую гибкость и увеличивают его возможности.
Многие, если не все, конструкции гексаподов вдохновлены движением насекомых семейства Hexapoda (по-гречески шестиногих). Они также используются для проверки различных биологических теорий о передвижении и управлении моторикой насекомых. Эти гексаподы используют различные типы походок, чтобы двигаться. Наиболее распространены:
- Чередующийся штатив: из шести возможных одновременно только 3 ноги остаются на земле, и
- Ползание: только одна нога остается на земле, создавая впечатление ползания.
13. Гибридный робот
У нас были роботы с ногами и роботы с колесами, но компания Boston Dynamics, занимающаяся робототехникой, запустила исследовательского робота под названием Handle, который может вырастать до 6,5 футов и путешествовать на короткие расстояния со скоростью 9 миль в час. Он также может прыгать вертикально на высоту до 4 футов.
Хотя у него есть все основные принципы работы, найденные в четвероногом роботе, то есть баланс и мобильные манипуляции, он использует только 10 приводимых в действие суставов, поэтому он намного проще, чем другие Ходячие роботы. С колесами, эффективными на ровном покрытии и ногами на довольно пересеченной местности, «Handle» действительно может справиться с чем угодно.
14. Летающие роботы

Без тени сомнения, летающие роботы — самые популярные типы роботов. Прямо сейчас некоторые крупные транснациональные компании планируют внедрить эти автоматизированные летательные аппараты в свой повседневный бизнес. Эти роботы не просто крутые; они также прочные и аэродинамически надежные.
В некоторых областях Amazon начала доставлять товары с помощью летающих дронов. Эти полностью электрические и автономные дроны могут летать на расстояние до 25 км и доставлять клиентам посылки весом не более 2 кг менее чем за 30 минут.
15. Плавательные роботы
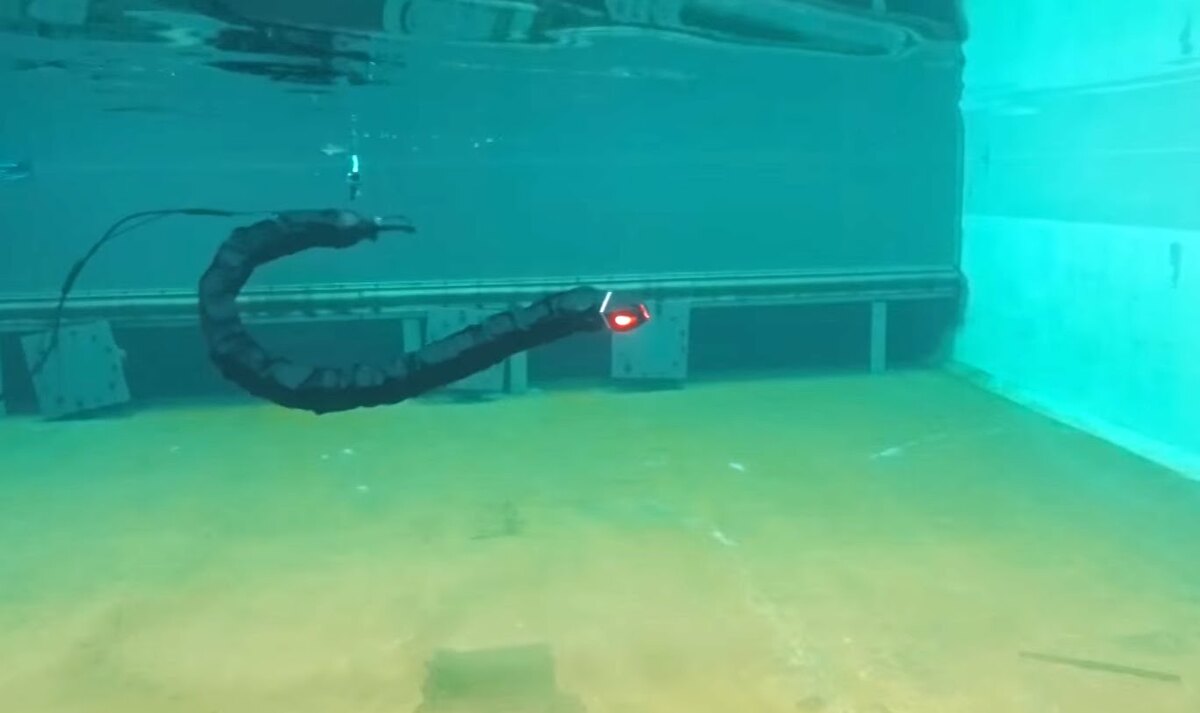
И почему летающие роботы должны быть в центре внимания, почему не плавательные роботы. Да, они такие же крутые, как летающие роботы; Единственная разница в том, что вместо полета они умеют плавать. Эти роботы могут принимать форму насекомых, рыб или большой скользящей змеи.
Источник Источник https://new-science.ru/15-razlichnyh-tipov-robotov/




