Автомобильный справочник
для настоящих любителей техники
Системы управления бензиновым двигателем
Системы управления бензиновым двигателем обеспечивают передачу на двигатель команд, отдаваемых водителем. Она управляет двигателем таким образом, чтобы двигатель обеспечивал требуемый уровень крутящего момента при минимальных возможных расходе топлива и токсичности отработавших газов.
Описание системы управления бензиновым двигателем
Выходная мощность двигателя определяется крутящим моментом, передаваемым сцеплению и частотой вращения коленчатого вала. Крутящий момент на сцеплении — это момент, производимый за счет сгорания топлива минус момент трения (потери на трение в двигателе), момент потерь на газообмен и момент, необходимый для привода вспомогательных агрегатов (см. рис. «Распределение крутящего момента в силовой передаче» ). Крутящий момент на ведущих колесах равен моменту на входе сцепления за вычетом потерь в сцеплении и трансмиссии. Этому результирующему крутящему моменту противодействуют такие силы, как сопротивление качению шин и аэродинамическое сопротивление. В зависимости от команды водителя, между этими силами сопротивления и крутящим моментом может иметь место состояние либо равновесия, либо дисбаланса. В случае равновесия автомобиль движется с постоянной скоростью. В противном случае имеет место ускорение или замедление.
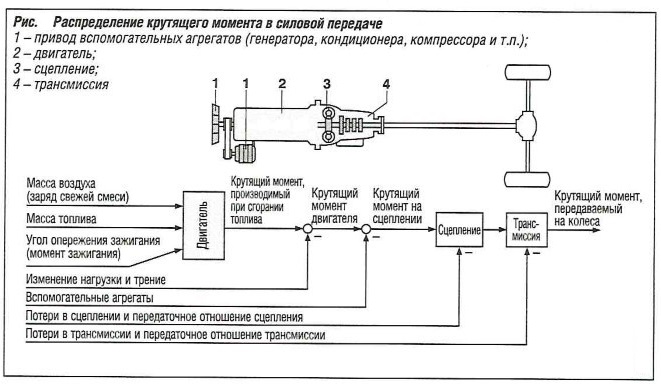
Крутящий момент, производимый двигателем, определяется в основном следующими переменными:
- Массой воздуха, доступного для сжигания топлива после закрытия клапанов;
- Массой топлива в цилиндре;
- Моментом зажигания.
В меньшей степени оказывают влияние на крутящий момент также состав топливновоздушной смеси (количество остаточных отработавших газов) или процессы сгорания топлива.
Основной функцией системы управления двигателем является координация работы различных подсистем с целью регулирования крутящего момента, производимого двигателем, с соблюдением требований к ограничению токсичности отработавших газов, расходу топлива, выходной мощности и уровню комфорта и безопасности. Система управления двигателем также выполняет диагностику различных подсистем.
Обзор системы управления бензиновым двигателем
Электронная система управления бензиновым двигателем
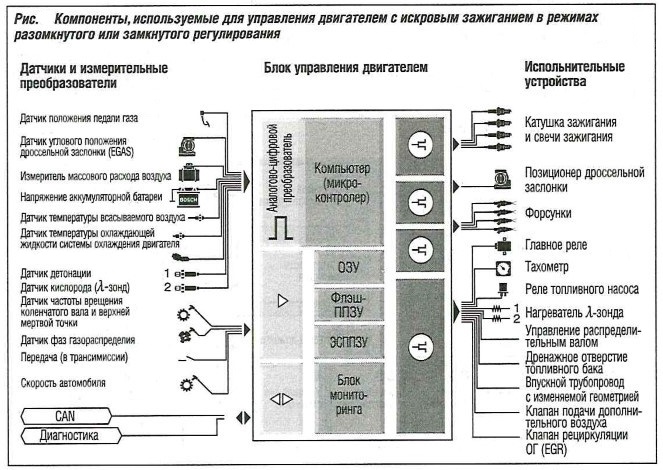
Системы управления Motronic предназначены для управления двигателем в режимах замкнутого или разомкнутого регулирования. Система Motronic (рис. » Компоненты, используемые для управления двигателем с искровым зажиганием в режимах разомкнутого или замкнутого регулирования» ) включает все датчики, необходимые для измерения значений параметров двигателя и автомобиля в целом, и исполнительные устройства, осуществляющие требуемое регулирование. Блок управления использует данные, поступающие с датчиков для определения состояния автомобиля и двигателя. Этот процесс выполняется с очень высокой частотой (с периодом в несколько миллисекунд для обеспечения регулирования в режиме реального времени). Во входных цепях происходит подавление помех и преобразование сигналов в электрическое напряжение с использованием единой унифицированной шкалы. Аналого-цифровой преобразователь затем преобразует отфильтрованные сигналы в цифровую форму. Другие сигналы принимаются через цифровые интерфейсы (например, шины CAN, FlexRay) или через интерфейсы широтно-импульсной модуляции (ШИМ).
Основным устройством блока управления двигателя является микропроцессор с программной памятью (например, флэш-ППЗУ), в которой хранятся все алгоритмы управления, т.е. алгоритмы математических вычислений, выполняемых в соответствии со специальными программами, и данные (параметры, характеристики, карты программ). Входные переменные, полученные в результате обработки сигналов датчиков, оказывают влияние на алгоритмы вычислений и, следовательно, на выходные сигналы, поступающие на исполнительные устройства. Исходя из этих входных сигналов, микропроцессор определяет требуемые реакции на команды водителя и вычисляет, например, необходимый крутящий момент, величину заряда топлива, поступающего в цилиндры, момент зажигания и подает соответствующие выходные сигналы на исполнительные устройства (например, системы контроля выделения паров топлива, турбокомпрессор и систему подачи дополнительного воздуха).
Сигналы низкого уровня, выходящие из микропроцессора, посредством задающего каскада усилителя мощности преобразуются в сигналы тех мощностей, которые требуются различным исполнительным устройствам.
Еще одной важной функцией системы Motronic является мониторинг работоспособности всех систем с использованием системы бортовой диагностики (OBD). В целях выполнения дополнительных требований, предъявляемых к системе Motronic нормативными положениями, примерно половины вычислительной мощности системы Motronic расходуется на выполнение задач, связанных с диагностикой.
Функции системы управления бензиновым двигателем
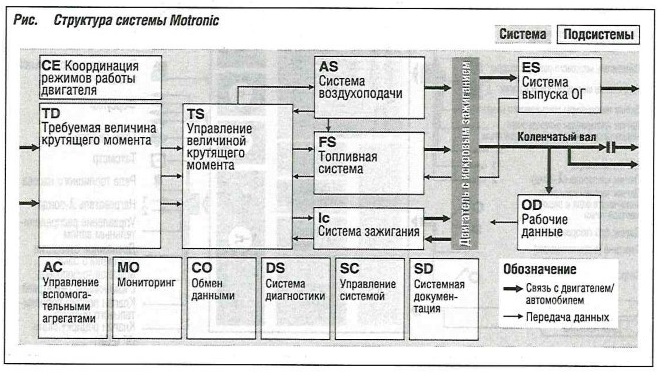
Система управления двигателем, кроме основных функций регулирования подачи топлива, смесеобразования и зажигания, выполняет большое количество вторичных функций. Для большей ясности система подразделяется на несколько подсистем. Полная структура системы Motronic показана на рис. «Структура системы Motronic».
Система определения требуемого крутящего момента (TD)
Водитель выдает прямую команду управления посредством изменения положения педали акселератора. Положение педали акселератора преобразуется в значение уставки для системы определения требуемого крутящего момента.
Кроме прямого ввода команды водитель также может отдавать команды косвенным образом, используя систему круиз-контроля. Требуемый крутящий момент вычисляется, исходя из текущих условий движения.
Если педаль акселератора не нажата, система вычисляет крутящий момент, необходимый для поддержания оборотов холостого хода.
Функция демпфирования, электрическая система (стартер, генератор, аккумуляторная батарея) и другие электрические потребители, такие как система кондиционирования воздуха, предъявляют дополнительные требования в отношении крутящего момента.
Система управления величиной крутящего момента (TS)
Переменное значение требуемого крутящего момента, определенное системой TD, потребности трансмиссии, потребности динамики движения и прочие потребности двигателя (например, нагрев каталитического нейтрализатора) координируются в подсистеме управления величиной крутящего момента. Результатом является определение общего требуемого крутящего момента двигателя внутреннего сгорания.
Исходя из значения общего крутящего момента, генерируются заданные значения объема заряда топлива, впрыска топлива и момента зажигания.
Объем заряда вводится как относительная масса воздуха. Относительная масса воздуха (стандартизованная для всех классов двигателей) представляет собой отношение фактической массы воздуха в цилиндре к максимально возможной массе воздуха при данной частоте вращения коленчатого вала.
Заданное значение момента зажигания описывается углом опережения зажигания.
Снижение крутящего момента может производиться посредством пропуска впрысков топлива (например, в соответствии с требованиями системы контроля тягового усилия). С этой целью определяется количество пропусков впрыска.
В системах с прямым впрыском топлива можно задать режимы работы на обедненной смеси (например, с послойным распределением заряда топлива в камере сгорания). В этих режимах работы также можно задать значение крутящего момента двигателя посредством ввода заданного значения коэффициента избытка воздуха λ.
Исходя из значений сигналов различных датчиков, физические модели генерируют требуемое фактическое значение крутящего момента на сцеплении. Это значение фактического крутящего момента используется для контроля системы Motronic, а также требуется для других систем, таких как системы управления трансмиссией.
Система управления воздухоподачей (AS)
Относительное значение массы воздуха, введенное из подсистемы управления величиной крутящего момента, преобразуется в конкретное количество, требуемое для исполнительных устройств, используемых для регулирования количества подаваемой в цилиндры смеси.
Основным исполнительным устройством является дроссельная заслонка. Для вычисления угла открытия дроссельной заслонки, исходя из заданного значения массы воздуха, используются модели. В свою очередь, исходя из значения угла открытия, осуществляется управление приводом дроссельной заслонки с использованием широтно-импульсной модуляции.
Имеются подсистемы, в которых основным методом регулирования является активация впускных и выпускных клапанов. В таких системах Дроссельная заслонка обычно остается постоянно открытой. Только в особых случаях (например, в аварийном режиме) дроссельная заслонка используется в качестве регулятора заряда смеси.
В случае двигателей с турбонаддувом также учитывается активация перепускной заслонки нагнетателя, приводимого в действие отработавшими газами, или управление нагнетателем с механическим приводом.
Еще одним видом исполнительных устройств являются системы регулирования положения распределительных валов и клапаны системы рециркуляции отработавших газов.
Кроме того, определяется фактическая текущая величина заряда смеси, подаваемого в цилиндры двигателя внутреннего сгорания. Для этой цели в качестве основных переменных используются сигналы датчиков температуры и давления во впускном трубопроводе.
Система топливной системы (FS)
Функцией топливной системы является подача топлива из топливного бака в топливную магистраль в требуемом количестве и под предписанным давлением.
Используя текущее фактическое значение заряда смеси, давление топлива в топливной магистрали и впускном трубопроводе, и продолжительность открытия форсунок вычисляются, исходя из заданного значения λ.
В целях оптимизации состава топливновоздушной смеси топливные форсунки активируются синхронно с углом поворота коленчатого вала.
Долгосрочная адаптация фактического значения λ обеспечивает повышение точности дозирования топлива.
Система зажигания (IS)
Результирующий момент (угол) опережения зажигания вычисляется, исходя из заданного значения входного сигнала зажигания, условий работы двигателя и внешних воздействий (например, системы контроля детонации). Таким образом, искра генерируется на электродах свечи зажигания в требуемый момент.
Угол опережения зажигания устанавливается таким образом, чтобы двигатель работал с оптимальным расходом топлива. Система отступает от этого принципа только в некоторых особых ситуациях (например, при нагреве каталитического нейтрализатора или быстром снижении крутящего момента во время переключения передач).
Система предотвращения детонации непрерывно контролирует процесс сгорания топлива в цилиндрах. Она обеспечивает работу двигателя с оптимальным расходом топлива, вблизи порога возникновения детонации. В то же время система позволяет избежать повреждений, обычно вызываемых детонацией. Система предупреждения детонации подлежит непрерывному мониторингу с тем, чтобы в случае неисправности момент опережения зажигания мог быть скорректирован надлежащим образом и установлен на достаточном расстоянии от порога возникновения детонации.
Система выпуска отработавших газов (ES)
В системе выпуска отработавших газов выполняется вычисление воздействий в замкнутой или разомкнутой системах регулирования, необходимых для обеспечения оптимальной работы трехкомпонентного каталитического нейтрализатора. Состав топливно-воздушной смеси должен регулироваться в узком диапазоне, вблизи стехиометрического соотношения воздух/топливо.
Подсистема также осуществляет мониторинг каталитического нейтрализатора. В качестве основы для этого мониторинга служат сигналы датчиков системы выпуска отработавших газов (например, кислородного датчика).
Функция защиты компонентов предотвращает тепловую перегрузку системы выпуска отработавших газов. Фактические значения температур в системе выпуска отработавших газов, требуемые для этой цели, обычно моделируются.
В режиме работы на обедненной смеси с послойным распределением заряда топлива (в случае бензинового двигателя с прямым впрыском топлива) также регулируется состав топливно-воздушной смеси с целью обеспечения оптимальной работы каталитического нейтрализатора NОх аккумуляторного типа.
Cистема координации режимов работы двигателя (СЕ)
В случае бензинового двигателя с прямым впрыском топлива система координирует и переключает режимы работы двигателя (например, работа с гомогенной смесью или послойным распределением заряда топлива в камере сгорания). Для определения требуемого режима работы необходимо координировать потребности различных функций на основе определенных приоритетов.
Система рабочих данных (OD)
Cистема рабочих данных оценивает значения переменных величин, характеризующих состояние двигателя (например, частоты вращения коленчатого вала, температуры), выполняет цифровую обработку сигналов и проверку достоверности и делает результат доступным для других подсистем.
Адаптация допусков определения частоты вращения позволяет более точно регулировать впрыск топлива и момент зажигания.
Определяется необходимость в пропусках зажигания в качестве функции защиты каталитического нейтрализатора.
Система управления вспомогательными агрегатами (АС)
В систему управления двигателем часто встраиваются такие дополнительные функции, как управление компрессором кондиционера воздуха, управление вентилятором или регулирование температуры двигателя. Эти функции координируются в подсистеме управления вспомогательными агрегатами.
Система обмена данными (СО)
Электрическая сеть автомобиля содержит большое количество других систем (например, система управления трансмиссией или электронная система курсовой устойчивости), а также систему Motronic. Обмен данными между системами осуществляется через стандартизованные интерфейсы (например, по шине CAN), Кроме того, сигналы из системы управления двигателем могут считываться диагностическими тестерами, при помощи которых также можно выполнять определенные настройки исполнительных устройств.
Система диагностики (DS)
Работоспособность системы Motronic непрерывно контролируется системой диагностики. Функции этой системы диагностики включают проверку электрических цепей и проверку достоверности сигналов посредством сравнения сигналов датчиков с моделями. Неисправности сохраняются в памяти и надлежащим образом обрабатываются (например, им присваиваются «временные отметки») В дальнейшем все неисправности можно просмотреть при помощи диагностического тестера. Некоторые диагностические функции доступны только при определенных граничных условиях (например, в определенных диапазонах температуры или нагрузки). Также существуют диагностические функции, которые должны выполняться в определенной последовательности. Координация этих последовательностей также осуществляется системой диагностики.
Система мониторинга (МО)
Мониторингу подлежат электронные системы автомобиля. Основной функцией системы мониторинга является сравнение величин крутящего момента. При этом сравнивается величина допустимого крутящего момента, вычисляемая, исходя из величины задания, т.е. сигнала, выдаваемого водителем, с величиной фактического крутящего момента, вычисляемого, исходя из параметров двигателя На следующих уровнях мониторингу подлежат ядро процессора и его периферийные устройства.
Система управления системой (SC)
Система осуществляет адаптацию системы Motronic. Перед вычислением отдельных функций необходимо обеспечить наличие соответствующих инфраструктур. Для оптимизации использования ресурсов («машинного времени») требуются различные алгоритмы вычислении (например, алгоритмы с синхронизацией по углу опережения зажигания или времени).
Определенные функции (например, функциональная диагностика выходных каскадов) выполняются перед пуском двигателя. Функция последовательного управления также управляет операциями сброса и повторного запуска электронного блока управления (ECU).
Подсистема системной документации (SD)
В дополнение к функциям замкнутого или разомкнутого регулирования, выполняемым системой Motronic, для детального описания конкретного проекта требуются многочисленные документы. Эти документы включают описания аппаратуры и программного обеспечения ECU, монтажные схемы, данные двигателя, описания компонентов и назначения контактов разъемов.
Версии системы Motronic
Первоначально система Motronic включала электронные системы управления впрыском топлива и зажигания, объединенные в одном блоке управления. В дальнейшем, в связи с постоянным ужесточением требований к ограничению токсичности отработавших газов, снижению расхода топлива и уровням комфорта и безопасности система постепенно приобретала все новые функции. Примерами этих дополнительных функций являются:
- Регулирование частоты вращения коленчатого вала на холостом ходу;
- Регулирование коэффициента избытка воздуха λ;
- Управление системой улавливания паров топлива;
- Управление системой рециркуляции отработавших газов с целью снижения содержания NOx и расхода топлива;
- Управление системой подачи дополнительного воздуха с целью снижения количества выбросов НС на стадиях пуска и прогрева двигателя;
- Управление турбокомпрессором, приводимым в действие отработавшими газами и впускным трубопроводом с изменяемой геометрией с целью улучшения рабочих характеристик двигателя;
- Регулирование положения распределительного вала с целью снижения токсичности отработавших газов и улучшения рабочих характеристик двигателя;
- Защита компонентов (например, контроль детонации, ограничение частоты вращения коленчатого вала, регулирование температуры двигателя).
Система управления двигателем Motronic, со времени ее первого появления в 1979 году, подверглась существенным усовершенствованиям. В дополнение к электронным системам многоточечного впрыска топлива были разработаны следующие, более простые и экономичные системы, позволяющие использовать систему Motronic на автомобилях среднего класса и компактных автомобилях:
- Система KE-Motronic на основе системы непрерывного впрыска топлива KE-Jetronic;
- Система Mono-Motronic на основе системы одноточечного впрыска топлива Мопо-Jetronic.
В настоящее время на новых автомобилях устанавливаются только многоточечные системы впрыска топлива:
- Система M-Motronic для управления зажиганием и впрыском топлива в системах впрыска топлива во впускной трубопровод с обычными дроссельными заслонками. Однако, эта система Motronic становится все менее популярной;
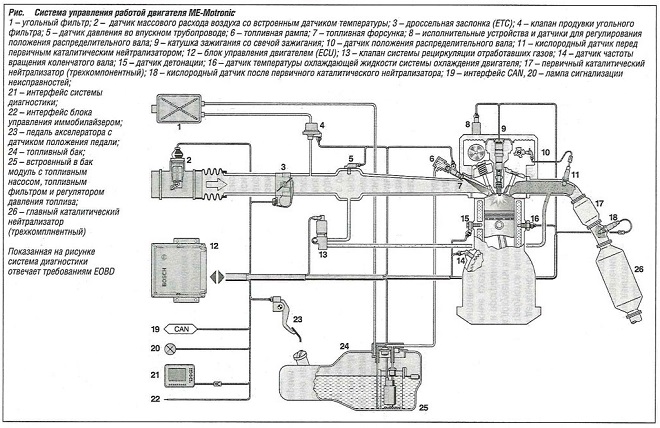
- Система ME-Motronic с электронной системой управления дроссельной заслонкой (ЕТС) для управления впрыском топлива, зажиганием и воздухозабором для систем впрыска топлива во впускной трубопровод (см. рис. «Система управления работой двигателя ME-Motronic» );
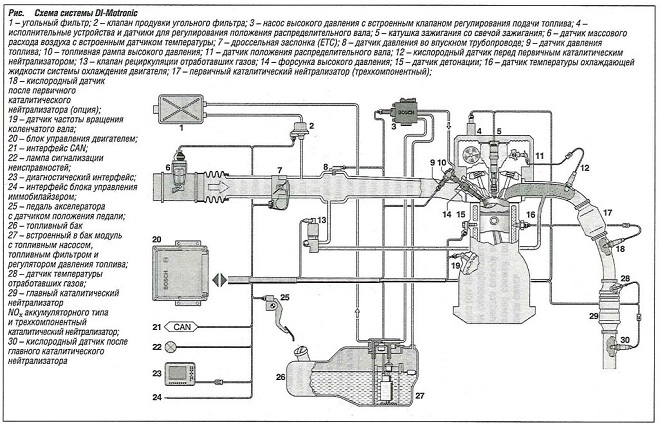
- Система DI-Motronic (прямого впрыска топлива) с дополнительными функциями замкнутого или разомкнутого регулирования для систем прямого впрыска топлива высокого давления на бензиновых двигателях и реализации различных режимов работы двигателей этого типа (рис. «Схема системы Dl-Motronic» );
- Двухтопливная система Bifuel-Motronic, предназначенная для управления компонентами, необходимыми для работы двигателя на бензине или природном газа (см. главу «Двигатели, работающие на природном газе»).
Система автоматического управления двигателем автомобиля
Д.Соснин
Любая электронная система автоматического управления (ЭСАУ) включает в свой состав множество различных преобразователей неэлектрических воздействий в электрические сигналы. Такие устройства принято называть датчиками, так как они задают необходимую входную информацию для работы ЭСАУ. При этом одна группа датчиков реагирует на внешние управляющие сигналы и случайные возмущения, а другая воспринимает сигналы от самой системы управления и возвращает их обратно в систему. Первая группа непосредственно управляет работой системы и адаптирует ее к случайным внешним воздействиям (возмущениям). Вторая — образует обратные связи, чем способствует улучшению параметров и характеристик системы, повышает эффективность ее работы. В данной статье описываются датчики, которые наиболее часто используются в электронных системах автоматического управления автомобильным двигателем
1. Предварительные замечания

Датчик (Д), как преобразователь неэлектрического воздействия (НВ) в электрический сигнал (ЭС), всегда состоит, как минимум, из двух частей (рис. 1а) — чувствительного элемента (ЧЭ), который обладает способностью воспринимать входное неэлектрическое воздействие, и преобразователя (П) неэлектрического сигнала (НС) от чувствительного элемента в электрический сигнал (ЭС).
Датчики бывают активными устройствами, в которых электрический сигнал возникает за счет внутреннего энергетического преобразования без использования внешней электрической энер гии (рис. 1 б), и пассивными, в которых электрический сигнал есть следствие модуляции внешней (ВЭ) электрической энергии (рис. 1 в). Например, обычное переменное сопротивление с ползунковым контактом (потенциометр) может выполнять функции пассивного датчика угла поворота.
2. Датчики угла поворота
Модель потенциометрического датчика угла поворота показана на рис. 1г. В таком пассивном датчике чувствительным элементом (ЧЭ) является ось вращения, на которую установлен ползунковый контакт, а резистивная дорожка П — это преобразователь углового положения оси (которое является неэлектрическим сигналом (НС) на выходе чувствительного элемента) в выходную резистивную величину (рис. 1д). Электрический сигнал (ЭС) на выходе потенциометрического датчика появится только после того, как на резистивную дорожку будет подана внешняя электрическая энергия (ВЭ) в виде постоянного напряжения. Тогда электрический потенциал на ползунковом контакте относительно одного из выводов резистивной дорожки и будет выходным электрическим сигналом (ЭС) датчика.
На рис. 1е показана линейная характеристика преобразования потенциометрического датчика. Характеристику можно легко изменить и сделать нелинейной, ступенчатой, с разной крутизной на участках, чем широко пользуются при изготовлении датчиков с требуемой характеристикой преобразования. Достигается это как изменением ширины резистивной дорожки на участках, так и распределением толщины резистивного слоя на ней. Иногда применяются многодорожечные двухползунковые потенциометры.
Следует заметить, что погрешность преобразования пассивного потенциометрического датчика зависит как от точности изготовления чувствительного элемента ЧЭ и преобразователя П, так и от стабильности постоянного напряжения внешней энергии ВЭ. Поэтому там, где требуется высокая точность, применяются специальные конструктивные меры [1], а постоянное напряжение ВЭ стабилизируется.
К потенциометрическим датчикам ЭСАУ-Д относятся: датчик углового положения дроссельной заслонки — ДПД (см. Ремонт & Сервис, 2000, № 2, с. 52, рис. 7); датчик углового положения ротаметра расходомера воздуха — ДРВ (см. Ремонт & Сервис, 2000, № 7, с. 46, рис. 2); датчик положения педали акселератора (ДПА); датчики положения различных поворотных устройств (например, поворотного барабана в узле дроссельной заслонки системы «Motronic», — см. Ремонт & Сервис, 2000, № 7, с. 49, рис. 5).
Классические датчики уровня топлива в бензобаке и давления масла в ДВС — также потенциометрические. Все потенциометрические датчики имеют на выходе аналоговый электрическийческий сигнал и при работе в составе цифровой ЭСАУ требуют применения аналого-цифровых преобразователей. Стандартная (образцовая) форма сигнала для потенциометрических датчиков угла поворота (на примере ДПД) показана на рис. 2 в*.

3. Контактные датчики ЭСАУ-Д
На современном автомобиле помимо потенциометрических достаточно большое количество контактных датчиков, состоящих из электрической контактной пары (преобразователь датчика) и механического толкателя (чувствительный элемент). Такие датчики являются пассивными и работают по принципу разрыва или замыкания элек трической цепи и поэтому на выходе имеют дискретный сигнал «да-нет», который легко преобразуется в цифровой.
В современных ЭСАУ-Д контактные датчики применяются в основном как датчики краевых положений дроссельной заслонки в составе датчика ее положения, или как отдельные устройства. В некоторых случаях контактный датчик используется как микровыключатель электробензонасоса при неработающем двигателе, но включенном зажигании. Такой датчик устанавливается в расходомере воздуха (см. Ремонт & Сервис, 2000, №2, с. 52, рис. 7).
4. Датчики Холла

Суть эффекта Холла состоит в том, что если прямоугольный токопроводящий брусок К, по которому протекает постоянный электрический ток Iв, поместить в поперечное постоянное магнитное поле В, то в третьем декартовом направлении на боковых гранях бруска будет наводиться электродвижущая сила Ех, которая по имени ее открывателя названа ЭДС-Холла. Направление этой ЭДС, как и в классическом индукционном трезубце (ILBLF), определяется по правилу левой руки. На рис. 3 а показана модель элемента Холла. Если магнитные силовые линии поля В в зазоре Р перекрыть магнитонепроницаемой шторкой, ЭДС-Холла исчезнет. Если шторку, которую часто называют магнитным аттенюатором, убрать, то ЭДС-Холла появится вновь. Таким образом элемент Холла совместно с магнитным аттенюатором образуют датчик, в котором чувствительным элементом является аттенюатор, а преобразователем — элемент Холла. Ясно, что для работы датчика Холла требуется внешний источник постоянного тока, т. е. этот датчик, как и вышеописанные, является пассивным. Для устойчивой работы и стабилизации выходного сигнала датчика элемент Холла собирается на полупроводниковой микроплате вместе с электронной схемой (рис. 3 б). В микроэлектронную схему входят усилительограничитель W, формирователь на триггере Шмидта Т, эммитерный повторитель VT и стабилизатор St напряжения питания.
В реальном датчике Холла (рис. 3 в) микроплата 1 и постоянный магнит 2,3 установлены неподвижно и разделены вращающимся аттенюатором 4, который выполнен в виде полого цилиндра с магнитопрозрачными окнами 5. Выходной сигнал такого датчика представляет собой последовательность прямоугольных импульсов со стабильными амплитудой и формой (см. рис. 2з), которые не зависят от скорости переключения датчика. Число импульсов в единицу времени и их длительность определяются частотой вращения магнитного аттенюатора и числом окон на нем.
Число окон на аттенюаторе ровно числу цилиндров ДВС.
Длительность каждого импульса при конкретной частоте следования определяется размером окна аттенюатора по периметру его окружности. Окно для первого цилиндра шире остальных, благодаря чему может быть зафиксирована точка начала отсчета.
Таким образом, с помощью датчика Холла и электронной схемы обработки его выходного сигнала могут быть определены три главных входных параметра для системы зажигания: частота вращения коленвала ДВС, его положение относительно верхней мертвой точки для любого цилиндра в любой момент времени, а также положение точки начала отсчета. Безынерционность датчика и стабильность параметров сигнала позволяют реализовать управление углом опережения зажигания в каждом такте, т. е. для каждого цилиндра в отдельности.
5. Пьезоэлектрические датчики
В современных ЭСАУ-Д помимо вышеописанных пассивных датчиков достаточно широко используются и активные. В активных датчиках реализуются самые разнообразные физические эффекты, при которых имеет место внутреннее энергетическое преобразование внешнего неэлектрического воздействия в выходной электрический отклик.
Примером к сказанному может служить пьезоэлектрический эффект. Устройство, реализующее этот эффект, показано на рис. 4 а и называется пьезоэлементом.

Суть пьезоэлектрического эффекта в том, что при механическом воздействии НВ на пластинку ПК пьезокристалла, которая с обеих сторон покрыта токопроводящей пленкой ТК и одним концом жестко закреплена в фиксирующем держателе ФД, на токопроводящих покрытиях ТК появляется разность электрических потенциалов (электрический сигнал ЭС), величина и форма которой пропорциональна степени прогиба пластинки под воздействием входного механического усилия НВ. Пьезокристаллический элемент может быть любой формы — прямоугольным бруском, плоской пластиной, круглой шайбой, трубчатым цилиндром, что определяется конструкцией опоры и местом приложения внешнего усилия к пьезоэлементу. Пьезоэлемент способен реагировать на самые разнообразные механические воздействия, начиная от одиночного удара и до высокочастотных ультразвуковых колебаний. Пьезоэлемент (преобразователь) совместно с конструктивным устройством для восприятия и передачи входного механического усилия (чувствительный элемент) образуют пьезоэлектрический датчик. Достоинствами такого датчика являются малые размеры, безынерционность и активный принцип действия (не требуется внешний источник электрической энергии).
На автомобиле пьезоэлектрические датчики применяются в ультразвуковых системах защиты стекол дверей от несанкционированного вскрытия, в системе предотвращения от соударений автомобиля с препятствием, но главное использование пьезоэлектрического датчика — в качестве датчиков ЭСАУ-Д. Таких датчиков два: измеритель абсолютного давления (разрежения) во впускном коллекторе двигателя (тензометрический датчик МАР нагрузки двигателя) и детонационный датчик.
• Пьезоэлектрический преобразователь детонационного датчика (ДД) выполняется в виде шайбы, которая посредством стяжного болта и инерционной массы прижимается к полированной площадке на блоке цилиндров (рис. 4 б). Точка установки датчика определяется экспериментально на этапе конструктивной разработки двигателя (в жидкостной ванне определяются узлы ультразвуковых волн на блоке цилиндров и выбирается тот, который поближе к камере сгорания). Для отработанной модели блока место установки датчика детонации остается постоянным. Стандартная форма сигнала детонационного датчика показана на рис. 2 д. В электронном блоке такой сигнал сначала фильтруется, а затем амплитуда огибающей функции сравнивается с допустимым уровнем для сигнала детонации. При превышении заданного уровня авторегулятор зажигания корректирует угол опережения зажигания соответствующим образом.
• Тензометрический датчик (МАП) абсолютного давления в отличие от детонационного является пассивным преобразователем. Под воздействием внешнего усилия в тензодатчике изменяется его внутреннее омическое сопротивление. Конструктивно тензодатчик представляет собой полупроводниковую микроструктуру, пьезоэлементом в которой является тонкая (около 0,2 мм) силиконовая пластина (рис. 4 в). На этой пластине технологически сформированы четыре резистивных зоны (омические сопротивления), которые соединены между собой по мостовой схеме. В одну диагональ моста подается стабилизирован ное напряжение +5 В, а напряжение, снимаемое с другой диагонали есть линейная функция от абсолютного давления (разрежения) над силиконовой пластиной. Для того, чтобы тензодатчик имел требуемую характеристику преобразования, под силиконовой пластиной создается герметизированная вакуумная полость (между пластиной и стеклянной подложкой). Остаточное давление в полости не превышает 0,1 бар, благодаря чему силиконовая пластина, как упругая диафрагма, прогибается в сторону вакуумной полости — при нормальном атмосферном давлении над пластиной, или полностью прогибается вверх при разрежении над пластиной — диафрагмой. Линейные размеры чувствительного элемента тензодатчика не превышают 2. 3 мм. Если тензодатчик предназначен для работы с цифровой ЭСАУ-Д, то его аналоговый сигнал преобразуется в форму, показанную на рис. 2и. Подобно датчику Холла, тензодатчик выполняется на общей подложке с микросхемой для формирования сигнала. Такой датчик обычно устанавливается непосредственно в электронном блоке ЭСАУ-Д и соединяется с задроссельной зоной впускного коллектора с помощью тонкого вакуумного шланга. Но возможны и другие варианты установки датчика МАР. Окончание следует
6. Индуктивные датчики

Как видно из рисунка, основными составными частями такого датчика являются катушка индуктивности L с постоянным магнитом NS (преобразователь) и зубчатый диск ФД, зубцы Z которого выполнены из ферромагнитного материала (чувствительный элемент). Спецификой индуктивного датчика является конструктивная разобщенность его элементов (диска и индуктивного преобразователя). Таким образом, индуктивный датчик ИД представляет собой только половину преобразователя неэлектрической величины (круговой частоты Wд коленвала) в электрический сигнал (в частоту F,- следования электрических импульсов). Другая половина — зубчатый диск ФД.
Принцип действия индуктивного датчика основан на первом законе электромагнитной индукции и заключается в том, что увеличение или уменьшение (изменение) магнитного потока Ф через витки Wд катушки индуктивности L вызывает возникновение в них (в витках) электродвижущей силы (ЭДС) Ed=WdФ/dt. Согласно приведенной модели (см. рис. 5а) для реализации описанного принципа в реальном индуктивном датчике его катушка L насажена на постоянный стержневой магнит NS. Один полюс магнита (например, северный N) выступает в сторону зубцов Z ферромагнитного диска ФД, а другой (южный S) упирается в цилиндрический магнитопровод МП. Магнитопровод МП и выступающий торец (магнитный щуп N) постоянного магнита совместно с зубцами Z ферромагнитного диска ФД образуют рабочий воздушный зазор датчика. При вращении диска ФД (коленвала ДВС) величина рабочего воздушного зазора постоянно изменяется от минимума, когда зубец находится под магнитным щупом датчика (соответствует чертежу рисунка), до максимума, когда под щуп попадает впадина между зубцами. Изменение рабочего зазора вызывает изменение его магнитного сопротивления, а значит и магнитного потока Ф через витки Wд катушки L. Это и приводит к появлению знакопеременной ЭДС, точка перемены знака (нулевая точка) которой соответствует середине вершины (центру) зубца. Нулевая точка может быть легко зафиксирована с помощью несложной обработки ЭДС E в электронной схеме. Это позволяет достаточно точно определять угловое положение каждого зубца диска (а значит и коленвала) относительно точки начала отсчета. Стандартная форма сигнала индуктивного датчика показана на рис. 2е.
Индуктивный датчик устанавливается так, чтобы его магнитный щуп находился в непосредственной близости (0,5. 1,5 мм) к ферромагнитным зубцам диска, а сам диск располагается либо на переднем, либо на заднем торце коленвала. Такой индуктивный датчик иногда называется датчиком оборотов двигателя (ДОД), так как он позволяет определять частоту Wд вращения коленвала двигателя по частоте F,- следования генерируемых им импульсов. Кроме того, с его помощью можно измерять угол поворота коленвала между двумя характерными событиями, сосчитав между ними число импульсов датчика. В последнем случае индуктивный датчик называется датчиком угловых импульсов (ДУИ).
Так как зубчатая (стартерная) венечная шестерня маховика дви гателя выполняется их ферромагнитного материала, то ее (шестерню) часто используют в качестве зубчатого диска индуктивного датчика. В таком случае для определения точки начала отсчета устанавливается второй (дополнительный) индуктивный датчик, генерирующий один импульс за один оборот коленвала. Ферромагнитным возбудителем дополнительного датчика является стальной штырь, ввернутый в маховик сбоку в определенном месте (рис. 5 б). Это место соответствует точке положения коленвала, от которой до верхней мертвой точки (ВМТ) первого поршня остается столько угловых градусов, сколько предусмотрено микропроцессором в данной цифровой ЭСАУ-Д для проведения вычислений угла опережения зажигания (обычно 45. 60°). Такое устройство называется датчиком начала отсчета (ДНО) и используется совместно с датчиком угловых импульсов (ДУИ).
Но функции датчика начала отсчета может выполнять и сам датчик угловых импульсов, если его возбудителем является зубчатый диск с пропуском одного или двух зубцов в том месте, где устанавливается стальной штырь для ДНО (рис. 5, в). Такой датчик называется индуктивным датчиком коленчатого вала (ДКВ). Образцовая осциллографическая форма сигнала ДКВ показана на рис. 2ж.
7. Датчики концентрации кислорода

Кислородный датчик* вырабатывает сигнал обратной связи Uд для электронного блока управления впрыском (ЭБУ-В), который (ЭБУ) корректирует состав ТВ-смеси по коэффициенту избытка воздуха а на входе системы. Корректировка реализуется изменением продолжительности впрыска бензина форсункой ФВ (изменяется длительность управляющего импульса St).
Датчик кислорода для ЭСАУ-Д может быть выполнен в трех вариантах: как химический источник тока (ХИТ) с управляемой по концентрации кислорода электродвижущей силой; как хеморезистор**, у которого величина электрического сопротивления зависит от парциального давления кислорода в омываемых датчик выхлопных отработавших газах; как термопара с термоЭДС, зависящей от концентрации кислорода.
• Датчик кислорода как ХИТ (рис. 6 б) состоит из двух платиновых элетродов Pt и твердого электролита из диоксида циркония ZrO2 между ними. Диоксид циркония имеет пористую структуру и нанесенные с обеих сторон (в вакууме) на его поверхность тонкие пленки платины (электроды), также пористые с микроскопическими отверстиями. По газовым потокам электроды разобщены так, что один из них находится во внешней окружающей среде (ВАС), а другой — омывается выходными отработавшими газами (ВОГ).
Таким образом, создается электрохимическая система [(O’2)Ptj [ZrO2] [Pt(O»2)], которая становится активной при нагреве до температуры выше 350°С. Природа возникающей активности указанной системы связана с высокотемпературным разложением молекул кислорода О2 на положительные ионы и свободные электроны (О2 > 2О+ + 2е). Такая реакция имеет место в порах твердого электролита за платиновыми пористыми электродами, где в присутствии платинового катализатора и при температуре выше 350°С кислород переходит в ионизированное состояние. Если концентрация кислорода с обеих сторон твердого циркониевого электролита одинаковая (О’2 = О»2), то разность электрических потенциалов на платиновых электродах равна нулю (количество носителей электрических зарядов в противоположных зонах одинаковое). С уменьшением концентрации кислорода в отработавших газах (О2′ > О’2) по сравнению с окружающей атмосферой (за счет выгорания О’ в цилиндрах ДВС) равновесие электрических зарядов нарушается, образуется движение ионов кислорода в электролите и на электродах возникает электродвижущая сила (ЭДС) Ед датчика. Полярность Ед относительно наружного электрода, соединенного с «массой» (с корпусом) датчика, — положительная.
На рис. 6г показан чертеж датчика концентрации кислорода в разрезе, который ввернут в трубу 1 выпускного коллектора. Атмосферный воздух (ВАС) попадает внутрь активного элемента 4 датчика через воздушные каналы 6, просверленные в крепежном корпусе 8. Выхлопные отработавшие газы (ВОГ) «омывают» наружную поверхность активного элемента 4, к которому они проникают через прорези 16 в защитном колпачке 2. Наружный контактный платиновый слой 3 активного элемента 4 электрически соединен с корпусом 8 и далее через уплотнительную шайбу 14 — с «массой» двигателя. Внутренний платиновый слой 5 (положительный электрод) соединен с клеммой 11 выходного сигнального контакта посредством прижимного контактного соединения 7 и соединительного штыря 12 с контактной шайбой 15. Внутренняя полость 13 — керамический изолятор. Назначение других деталей датчика концентрации кислорода (ДКК) очевидно из чертежа.

Характеристика преобразования кислородного датчика показана на рис. 6 в, а образцовая форма текущего значения сигнала ДКК — на рис. 2г. При коэффициенте а > 1 величина Ед
Термистор 3 помещается в защитный теплопроводный корпус 2 с крепежной резьбой для установ ки датчика в нужном месте и с электрическими контактами 1. По мере прогрева двигателя омическое сопротивление чувствительного элемента такого датчика (с NTC) уменьшается, а следовательно уменьшается и падение напряжения на ДТД. При этом образцовая форма сигнала датчика соответствует осциллограмме, показанной на рис. 2б.
В заключение следует отметить, что известен также целый ряд «экзотических» датчиков для ЭСАУ-Д (см., например, [2]). Но их применение на современных легковых автомобилях крайне ограничено.
Источник Источник Источник Источник https://press.ocenin.ru/sistemy-upravleniya-benzinovym-dvigatelem/
http://altay-krylov.ru/ch_datchik_el_sist.html





